
 高速高精度的外观检查
高速高精度的外观检查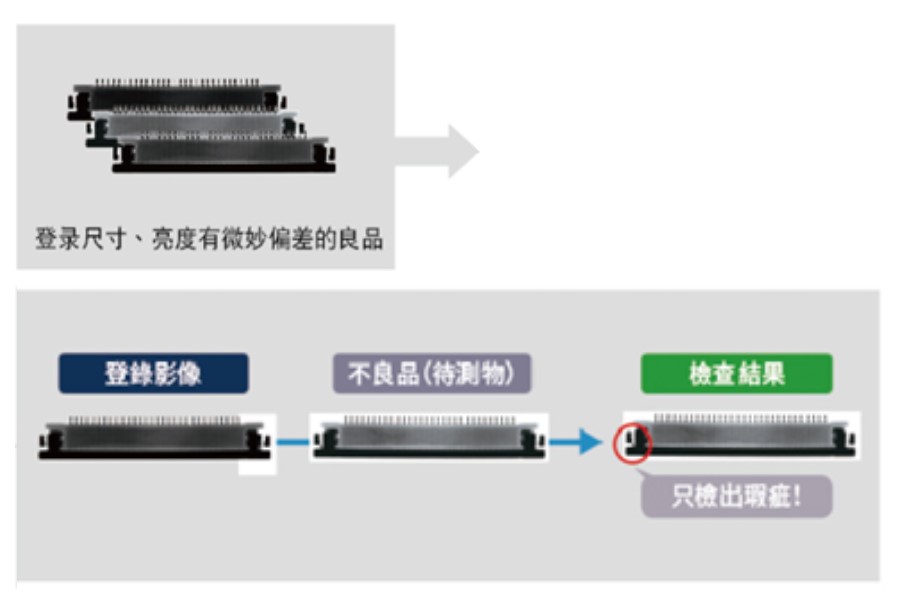
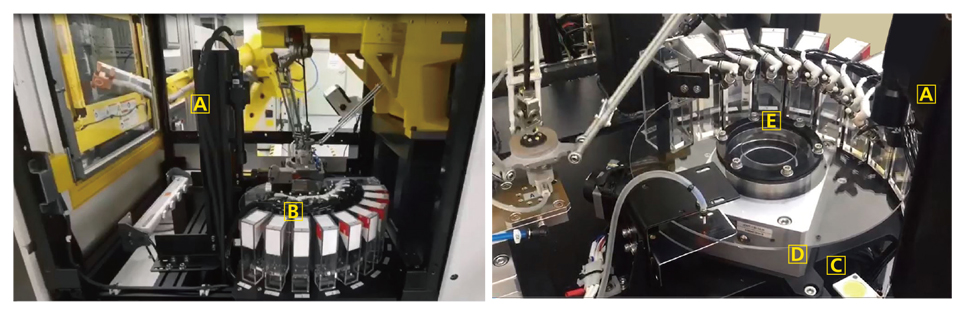 A:VISCO镜头组| B:分穴收集料盒| C:VISCO光源组| D:待检零件| E:分料吹气模组
A:VISCO镜头组| B:分穴收集料盒| C:VISCO光源组| D:待检零件| E:分料吹气模组









Touché
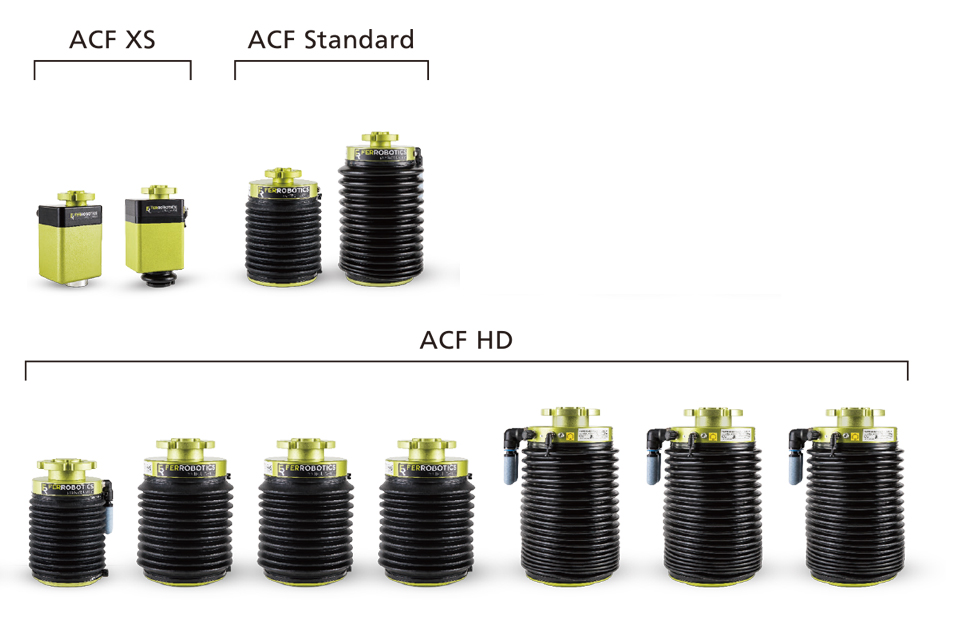
T-Skin

T-Skin 能升级您现有的机器人在既有空间内安全地运作,无需加装栅栏占据可用空间。支援业界最多机种,T-Skin 能维持最佳的机器人的作动及工作范围。
产品特色
- 快速安装升级产线
- 原机整合,低干涉
- 高感度
- 防无线电、电磁干扰
- 符合CE、ISO/TS15066国际安全标准
M-Teach 触觉感测器 直觉化人机协作教导
- 教点单纯化,可提升换线效率、降低劳工成本
- 可精细定位至0.05mm
- 不受机械手臂大小或载重影响,正常力量即可轻松教点

应用方案


